

61·
2 days agoProbably has to be renamed to “ClosedAI” then.
Probably has to be renamed to “ClosedAI” then.
The level of your argumentation:
Are you a firefighter or a medical doctor? If not, you’re obviously in favour of fires, death and disease.
Why aren’t you donating all of your stuff to homeless people? Or are you happy all those people don’t have a home?
Why aren’t you saving the world already???
You know, demanding change and maybe showing some sort of protest does not mean you need to do those things exactly as you would like to see them, especially if those efforts wouldn’t change anything on the larger scale and rather lead to a bunch of problems in your life.
Reading through the comments here makes one thing apparent again: clear and direct communication about one’s intentions can solve all of these misunderstandings. Being upfront will avoid that unnecessary “are they into me or not” over-analasys or missing such more or less subtle hints at all.
If you’re interested in someone, go for them! Tell them about your interest. It benefits you both. They’ll know, which can help in case they’re interested as well, and you’ll know what to expect whether they’re interested or not. This can also save you a lot of time, heart- and headache.
Where do you get this attitude that everything should be provided to you for free and you’re entitled to it?
From (non-capitalistic) utopic ideas, where humans try to be excellent to each other.
My point is, that the following statement is not entirely correct:
When AI systems ingest copyrighted works, they’re extracting general patterns and concepts […] not copying specific text or images.
One obvious flaw in that sentence is the general statement about AI systems. There are huge differences between different realms of AI. Failing to address those by at least mentioning that briefly, disqualifies the author regarding factual correctness. For example, there are a plethora of non-generative AIs, meaning those, not generating texts, audio or images/videos, but merely operating as a classifier or clustering algorithm for instance, which are - without further modifications - not intended to replicate data similar to its inputs but rather provide insights.
However, I can overlook this as the author might have just not thought about that in the very moment of writing.
Next:
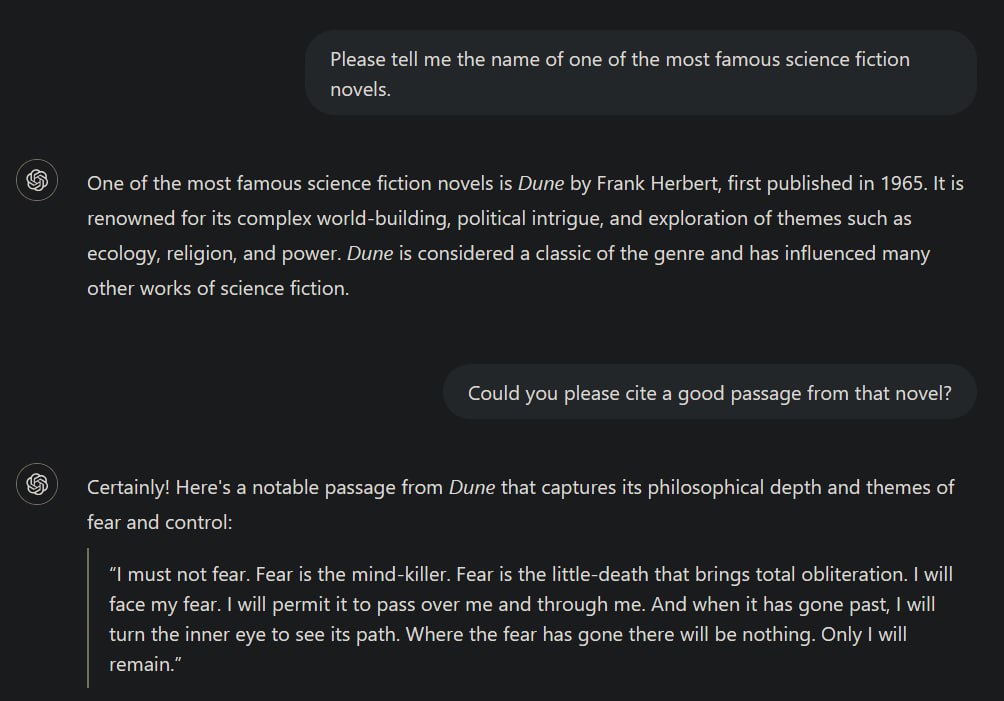
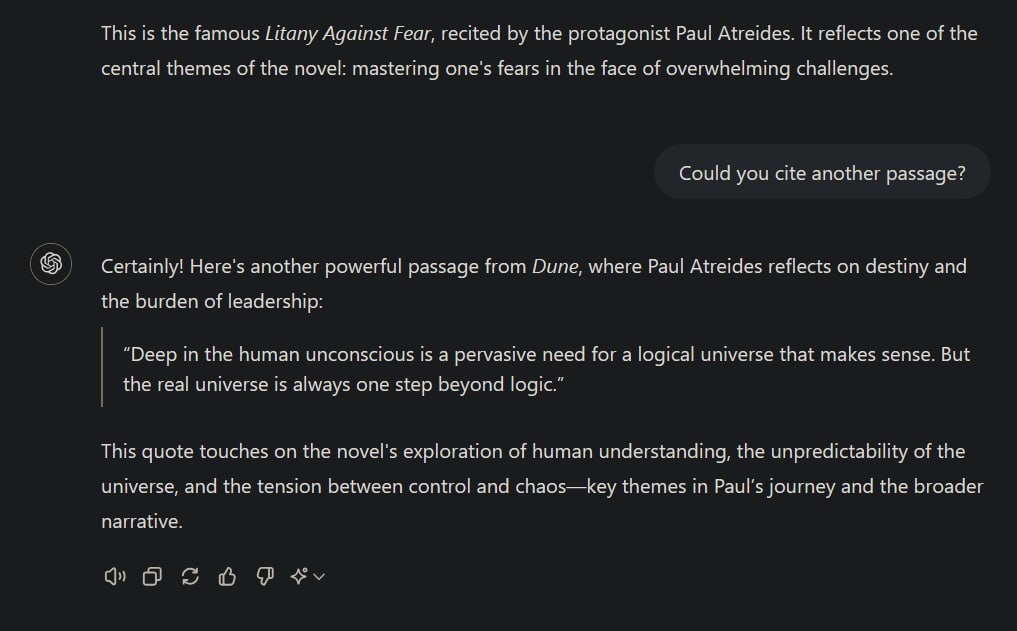
While it is true that transformer models like ChatGPT try to learn patterns, the most likely token for the next possible output in a sequence of contextually coherent data, given the right context it is not unlikely that it may reproduce its training data nearly or even completely identically as I’ve demonstrated before. The less data is available for a specific context to generalise from, the more likely it becomes that the model just replicates its training data. This is in principle fine because this is what such models are designed to do: draw the best possible conclusions from the available data to predict the next output in a sequence. (That’s one of the reasons why they need such an insane amount of data to be trained on.)
This can ultimately lead to occurences of indeed “copying specific texts or images”.
but the fact that you prompted the system to do it seems to kind of dilute this point a bit
It doesn’t matter whether I directly prompted it for it. I set the correct context to achieve this kind of behaviour, because context matters most for transformer models. Directly prompting it do do that was just an easy way of setting the required context. I’ve occasionally observed ChatGPT replicating identical sentences from some (copyright-protected) scientific literature when I used it to get an overview over some specific topic and also had books or papers about that on hand. The latter demonstrates again that transformers become more likely to replicate training data the more “specific” a context becomes, i.e., having significantly less training data available for that context than about others.
When AI systems ingest copyrighted works, they’re extracting general patterns and concepts - the “Bob Dylan-ness” or “Hemingway-ness” - not copying specific text or images.
Okay.
Coding is already dead. Most coders I know spend very little time writing new code.
Oh no, I should probably tell this my whole company and all of their partners. We’re just sitting around getting paid for nothing apparently. I’ve never realised that. /s
While I highly doubt that becoming true for at least a decade, we can already replace CEOs by AI, you know? (:
https://www.independent.co.uk/tech/ai-ceo-artificial-intelligence-b2302091.html
How did it end? Did they date then?
I am not alone it seems.
Today on the internet: Fun with spherical geometry.
Oh yeah, these unrelated autoplay videos are a great pleasure to stop and hide when scrolling. Waste of internet traffic.
There were no ads in the UI of the TV though.
That’s okay. I’m always in for stupid, shitty and flat jokes. It might put a brief smile on someones face and make this existence a little bit more bearable for a second.
I didn’t mean to offend you though.
Aww too bad.
Thank you. <3
Indeed I was.
I just saw a deleted comment, then your username and found it funny.


They do indeed forbid it.
Deuteronomy 21
Oh man, religions are batshit crazy.